將行動機器人開發時間減半

開發人員一開始會使用 ROS(機器人作業系統,現又稱為 ROS1),是因 ROS 消除了對於專有機器人程式設計知識的需求。但是,開發人員發現 ROS 無法支援整組(又稱群體)行動器人。
這個問題是即時編程、反應性、低延遲方面的限制造成的,而這三者都需要精準的機器人控制才能改善。舉例來說,智慧型工廠裡的一群自主行動機器人必須能夠互相合作,揀選、抓取並移動物品,且不互相干擾。這些任務如果沒有即時電腦視覺處理是不可能完成的。
ROS2 相較於 ROS1,提供了重大的 API 變更。這些變更讓作業系統能支援更多運算環境,利用與 ROS1 不相容的技術,並支援即時電腦視覺編程。理論上,開發人員可以將開放原始碼的中介軟體用於群體機器然上。
但是,仍然有一個問題,使得開發人員無法利用任一種 ROS 建造商用行動機器人。ROS 開放原始碼社群無法提供保固,為透過其作業系統建造的機器人背書。
這個情況給 ADLINK 創造了一個機會,ADLINK 推出了 ROS2 自主行動機器人控制器:ROScube。ROScube 是一個針對 ROS2 最佳化的開發平台,附保固,為客戶提供整合與簡化軟硬體的解決方案。此外,因為 ROScube 有一個演算法和軟體庫,它能將編程時間減半。
「傳統的機器人開發過程中,編程是最花時間的階段。開發人員可以將編程時間縮短百分之五十,這也就代表他們可以更快進行測試並做出改善。」ADLINK 的專案經理 Bill Wang 表示。
他說,解決方案整合商使用 ROScube,從現成到建立概念證明 (PoC) 部署只需要三個月的時間。他們之所以做得到,是因為他們用了 ROScube 所附的演算法,而非編寫自己的程式。
開發人員還可以獲得 ADLINK 提供的技術支援和疑難排解協助。此外,使用來自同一個公司的軟硬體能夠簡化行動機器人的建造過程,因為所有的部件都能一同順暢運作。
一窺機器人視覺
ROScube 含有 ADLINK Neuron SDK,適用內部溝通以及車輛間的協調,後者對於群體行動機器人應用是不可或缺的。該 SDK 還具備商業版本(相較於開放原始碼版本)的資料分散式服務 (DDS) 中介軟體,確保通訊穩定又即時。另外,它也提供了一系列 QoS 資源、NeuronLib API、UI 介面、機隊管理軟體,並具有 ROS1 和 ROS2 相容性。
開發人員能夠因此獲得額外支援,這是利用開放原始碼社群工具構建的機器人所缺乏的。開發人員唯一需要的技能,就是要會使用常見的程式語言,如 C、C++ 和 Python,且必須熟悉常規的作業系統,如 Linux。他們不必具備深入的機器人知識或專長。
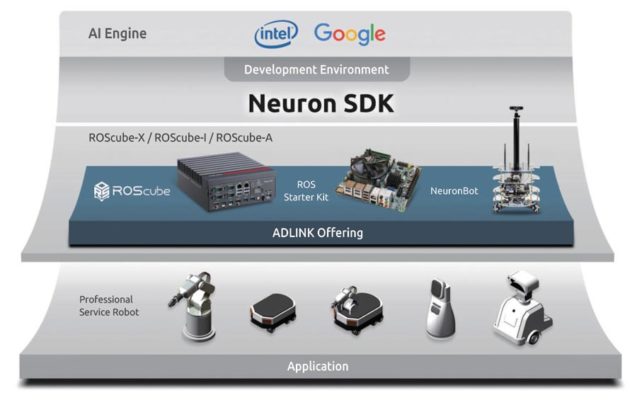
Neuron SDK、ROScube、ROS Starter Kit 和 NeuronBot 支援機器人視覺、物件辨識及訓練所需的 AI 演算法和推論運算平台(圖 1)。
效能絲毫不少
開發時間較短,並不代表效能或功能會被犧牲。ROScube 可與 Intel® RealSense™ 深度相機、Intel® Movidius™ VPU 神經運算引擎等技術搭配。
RealSense 相機可以讓自主行動機器人運算顏色及距離資訊,從而進行定位和導航。這點非常重要,因為此類機器人必須能夠計劃、執行和更改其路線,避免與移動中和靜止的物體相撞。
Movidius 中的 AI 演算法資料庫支援多種 AI 架構和神經網路,讓行動機器人可以學習並辨識物件和人臉。這兩項技能都非常重樣,會影響物品運送以及機器人與物品(包括其他機器人)何人之金的互動。
多部行動機器人與其他設備之間的即時通訊也可以透過 ROScube 控制器完成,控制器根據使用者選擇,可配有 Intel® Xeon® 或 Intel® Core™ 處理器,並有多種 I/O 連接埠。通過這種方式,使用 ROScube 構建的自主行動機器人可以使用電腦視覺來參與各種應用場景。
由於 ROScube 與 ROS1 和 ROS2 相容,它可以讓企業開發出最適合其需求的行動機器人類型。無論如何,這個解決方案都能縮短機器人編程時間、降低成本和提升效能。